Back to engineering projects
Real-Time

// PRJ_004 · Real-Time Embedded
Real-Time
Football Tracker.
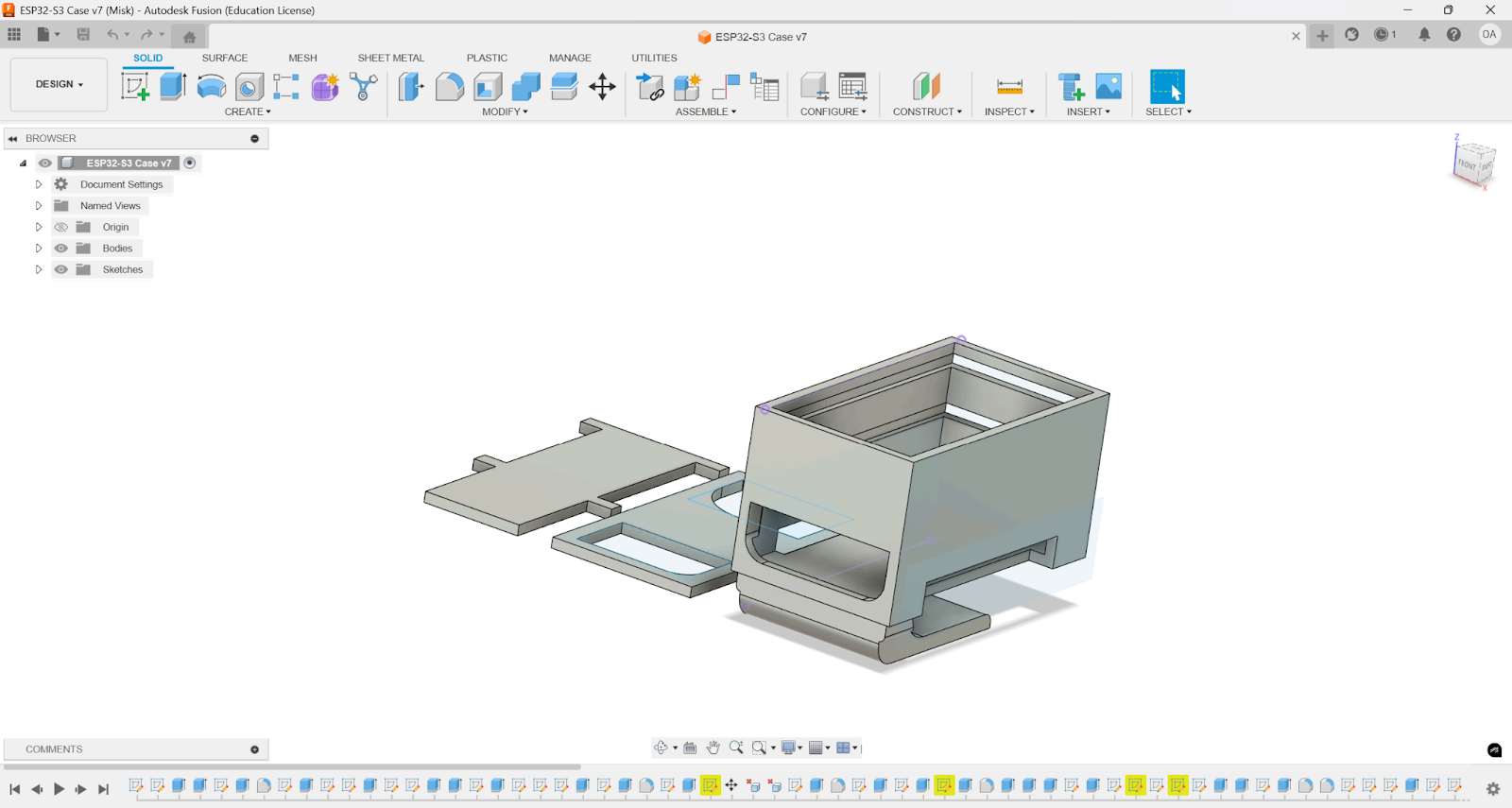
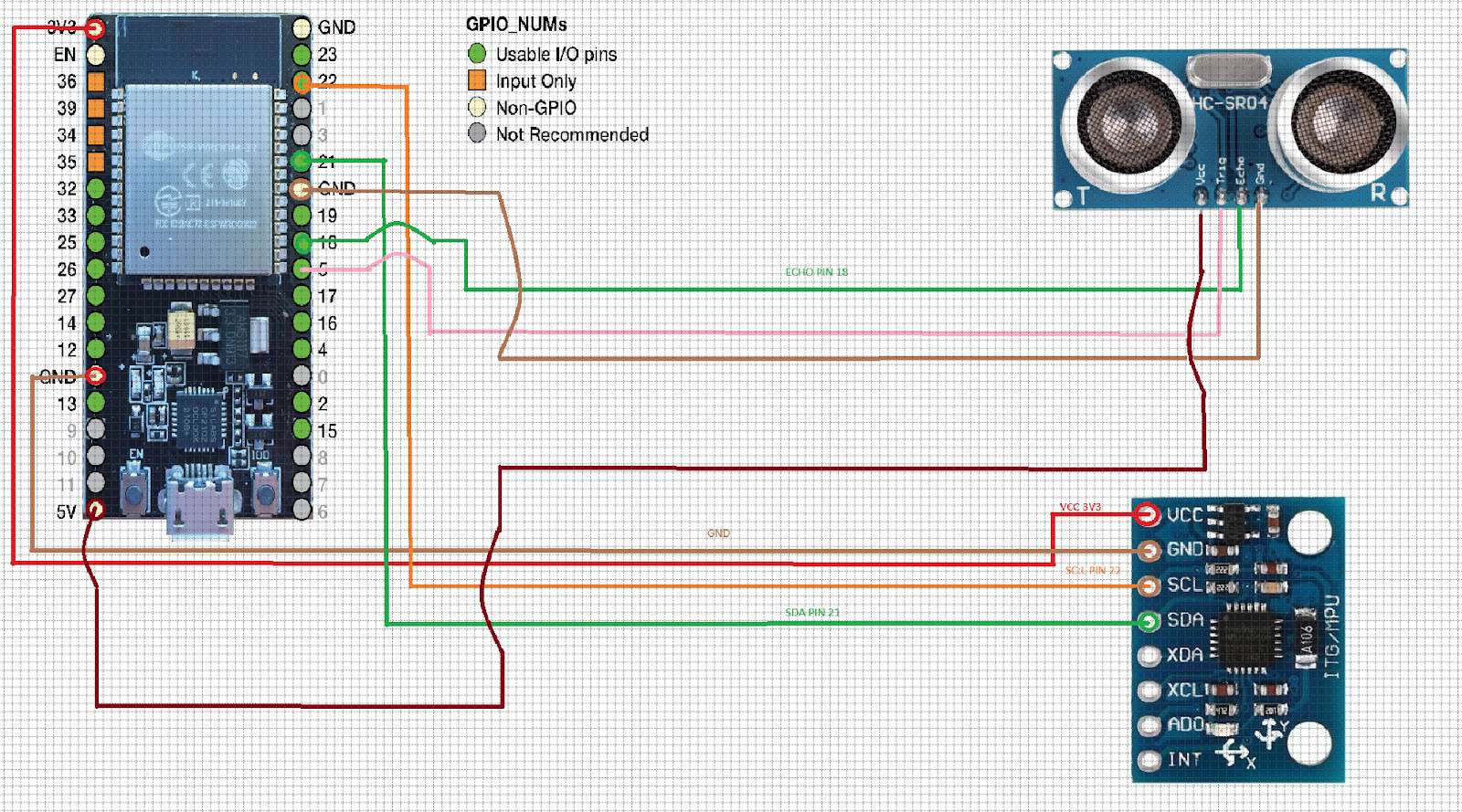
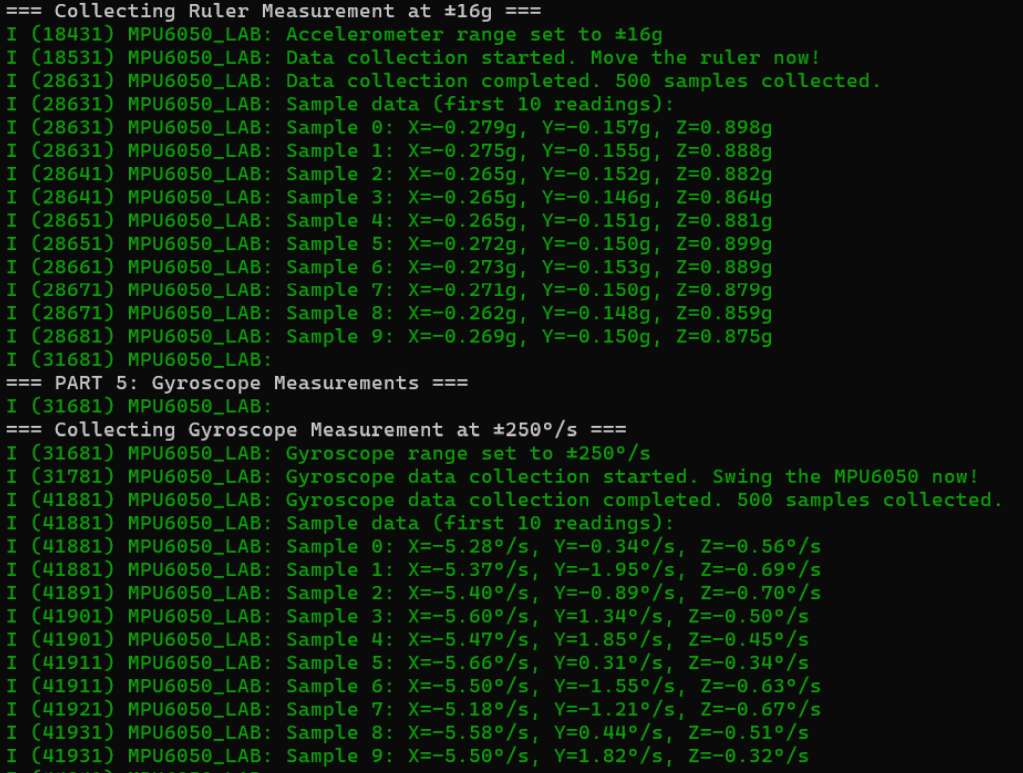
A wearable ESP32 + FreeRTOS system that classifies in-game actions — dribbles, passes, shots — in real time, while an ultrasonic sensor watches the space around the player. Multi-task scheduling, dynamic acceleration thresholds, and angle validation all run on the player's foot.
// Ankle-mounted prototype · ESP32 + ultrasonic