Back to engineering projects
Automated

// PRJ_002 · Robotics & Automation
Automated
Robotic Bartender.
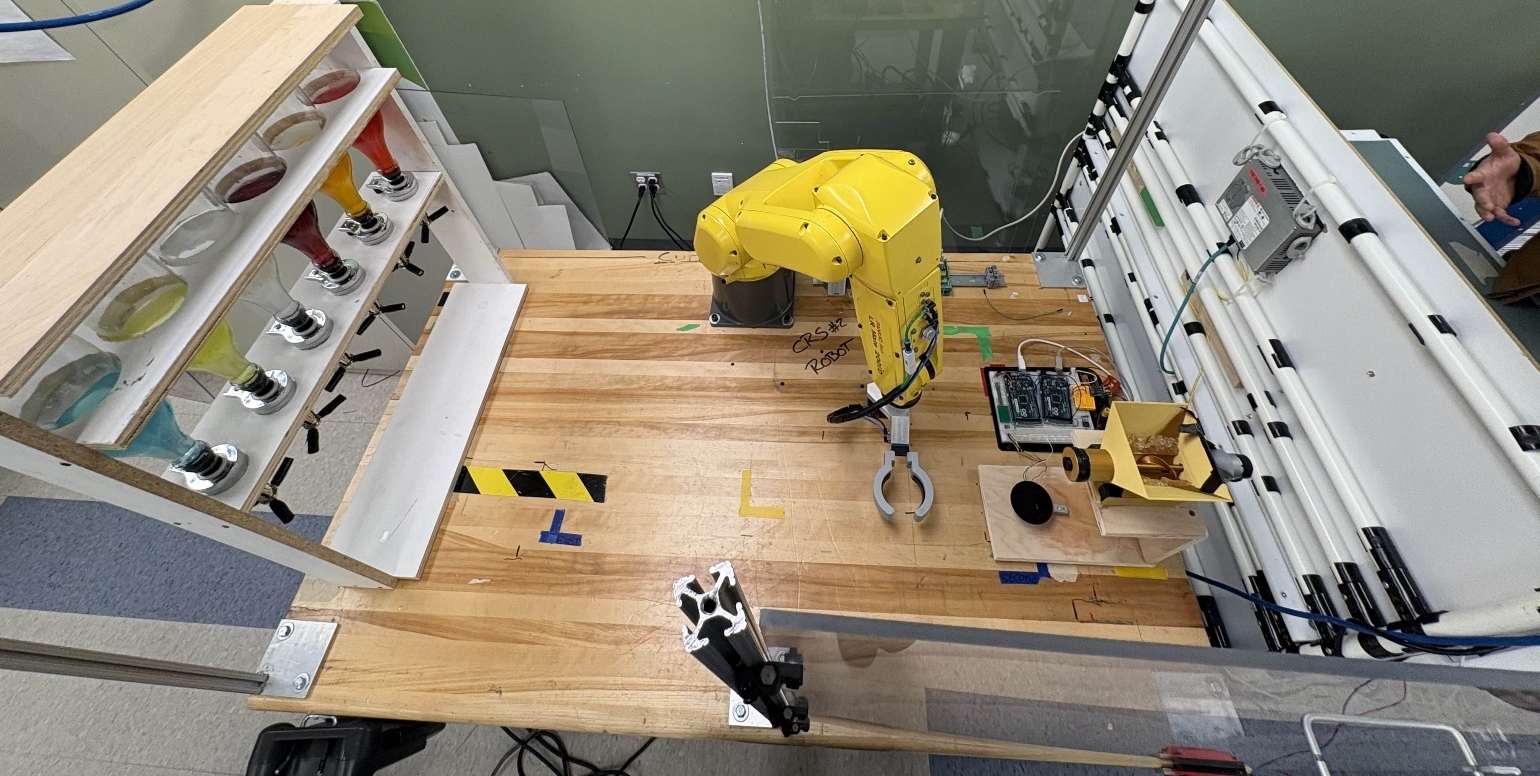
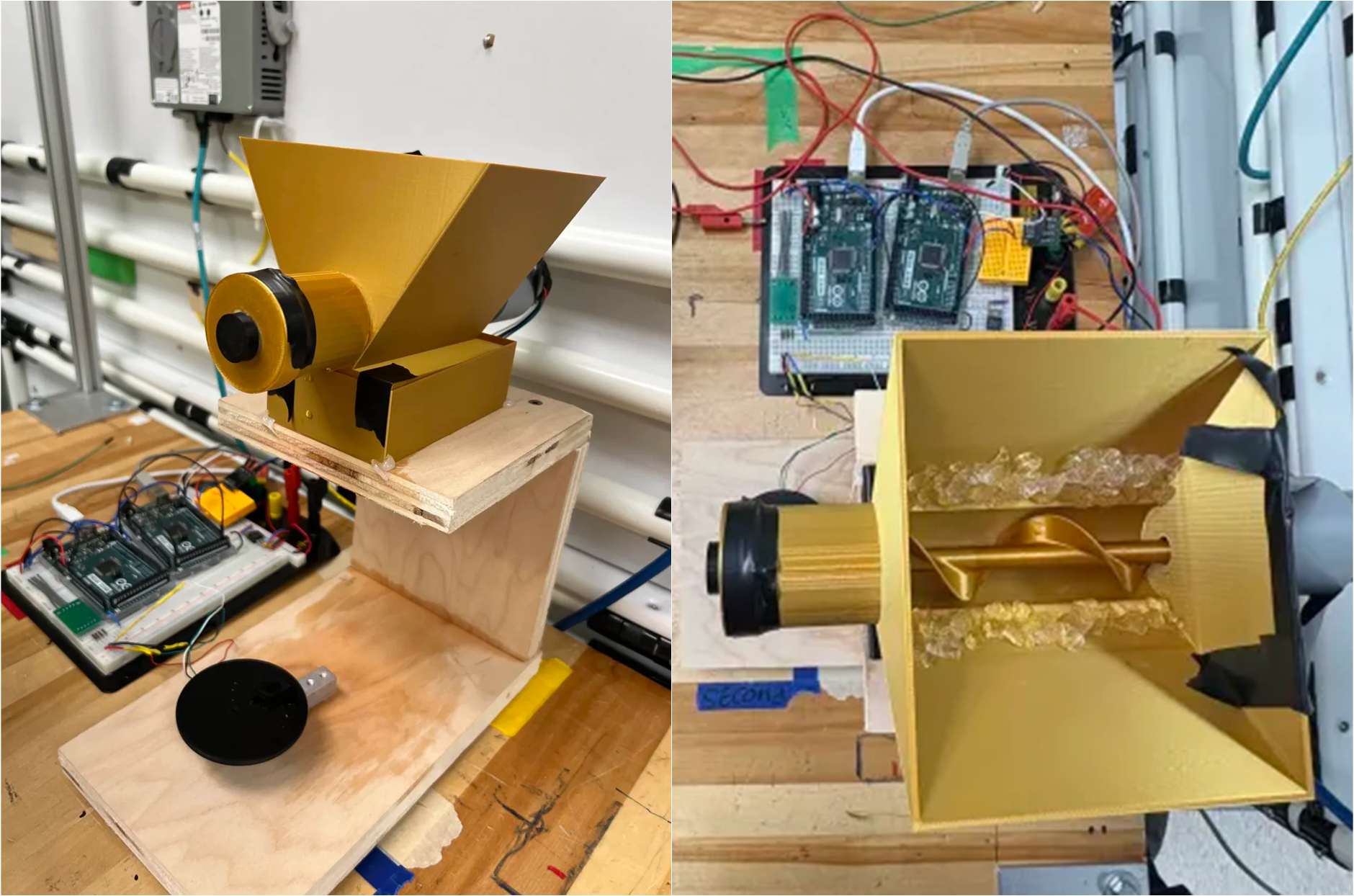
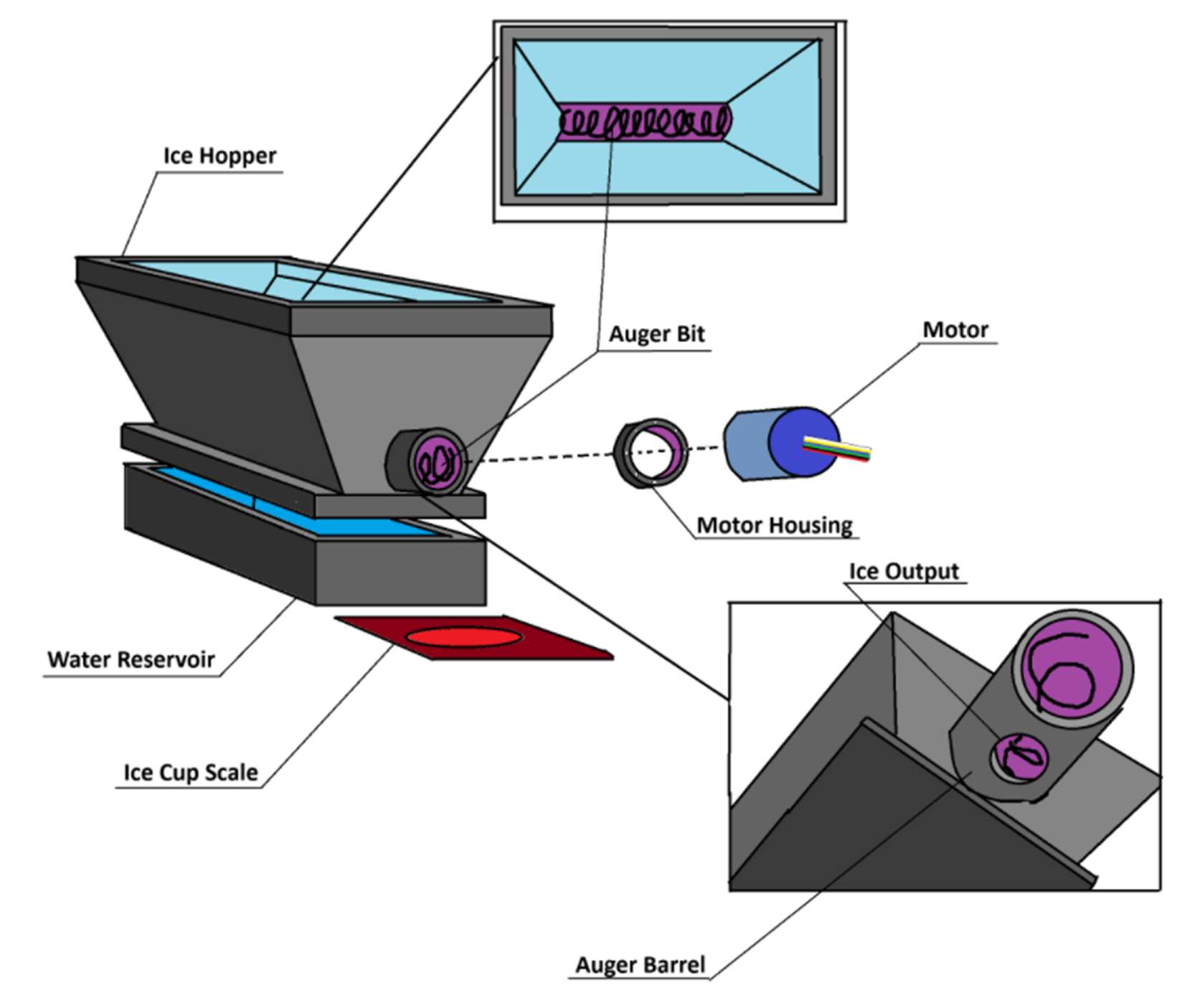
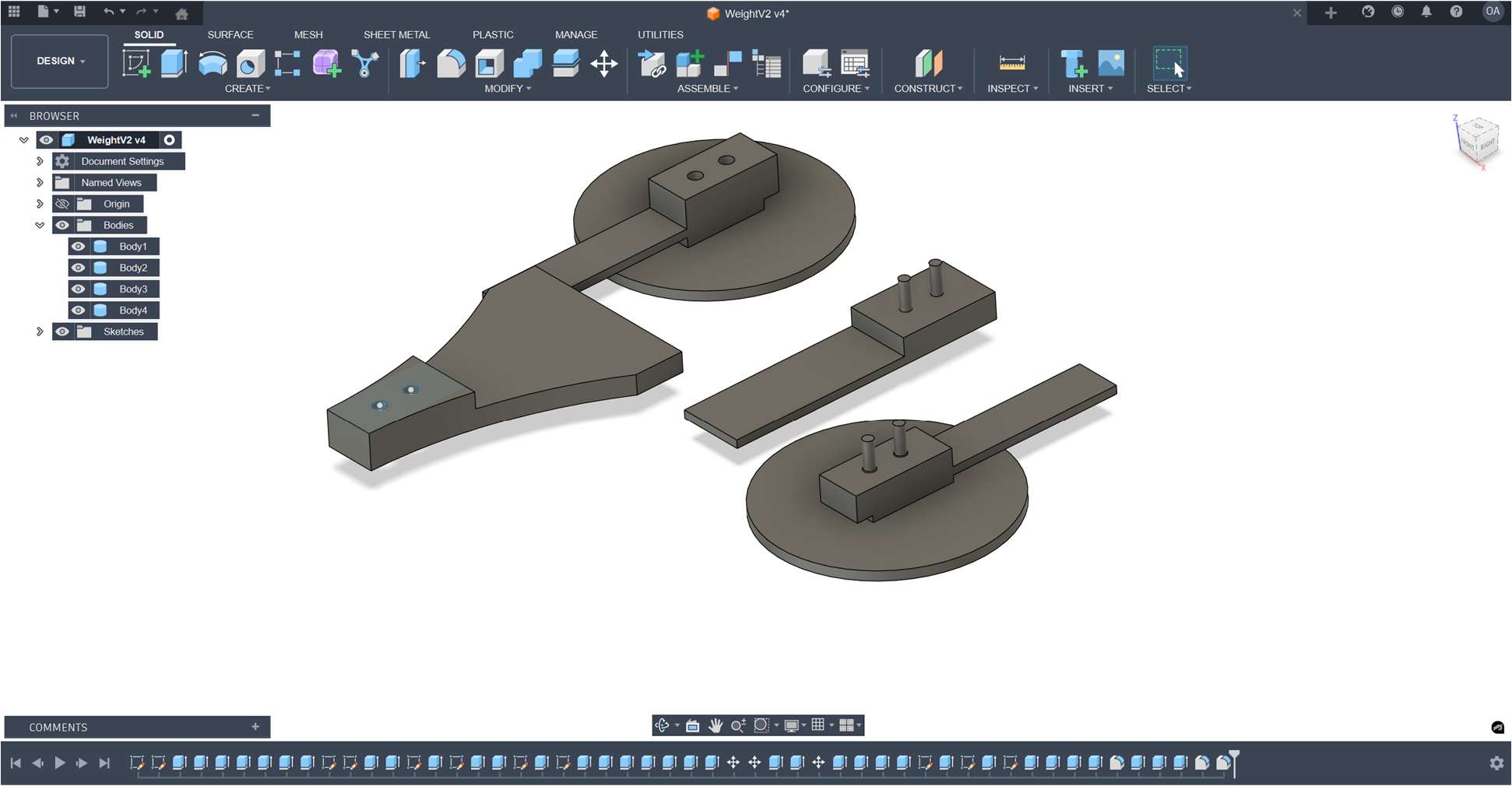
A FANUC LR Mate 200iD industrial cell that pours custom drinks end-to-end: HMI recipe selection, PLC ladder logic, weight-feedback ice dispensing, and mechanical Bar Butler nozzle pressing — all coordinated by a single push of a button.
// FANUC LR Mate 200iD · full cell